WikiDer > Марсианский климатический орбитальный аппарат
 Художественная концепция Mars Climate Orbiter | |
| Тип миссии | Марс орбитальный аппарат |
|---|---|
| Оператор | НАСА / JPL |
| COSPAR ID | 1998-073A |
| SATCAT нет. | 25571 |
| Интернет сайт | Марс |
| Продолжительность миссии | 286 дней Провал миссии |
| Свойства космического корабля | |
| Производитель | Локхид Мартин |
| Стартовая масса | 638 кг (1407 фунтов)[1] |
| Мощность | 500 Вт |
| Начало миссии | |
| Дата запуска | 11 декабря 1998, 18:45:51 универсальное глобальное время |
| Ракета | Дельта II 7425 |
| Запустить сайт | мыс Канаверал SLC-17A |
| Конец миссии | |
| Последний контакт | 23 сентября 1999 09:06:00 универсальное глобальное время |
| Дата распада | 23 сентября 1999 г. Непреднамеренно сброшен |
| Параметры орбиты | |
| Справочная система | Ареоцентрический |
| Эпоха | Планируется |
В Марсианский климатический орбитальный аппарат (ранее Орбитальный аппарат Mars Surveyor '98) весил 638 кг (1407 кг).фунт)[1] робот Космический зонд запущен НАСА 11 декабря 1998 г. для изучения Марсианский климат, Марсианская атмосфера, и поверхностные изменения и действовать как реле связи в Программа Mars Surveyor '98 за Марс полярный посадочный модуль. Однако 23 сентября 1999 г. связь с космическим кораблем была потеряна, так как он вошел в орбитальная установка, за счет наземного компьютерного программного обеспечения, которое выдавало продукцию в не-СИ единицы фунт-сила-секунды (фунт-сила· S) вместо Единицы СИ ньютон-секунд (Н · с), указанных в контракте между НАСА и Локхид. Космический корабль столкнулся с Марсом по траектории, которая привела его слишком близко к планете, и он был либо разрушен в атмосфере, либо повторно вошел в гелиоцентрическое пространство после выхода из атмосферы Марса.[2][3]
История миссии
История
После потери Марсианский наблюдатель и наступление роста затрат, связанных с будущим Международная космическая станция, НАСА начал искать менее дорогие зонды меньшего размера для научных межпланетных миссий. В 1994 году была создана Группа по технологиям малых космических аппаратов, чтобы установить руководящие принципы для будущих миниатюрных космических аппаратов. Группа определила, что новая линейка миниатюрных космических аппаратов должна весить менее 1000 кг (2200 фунтов) с высокоточными приборами.[4] В 1995 году новая программа Mars Surveyor началась как набор миссий, разработанных с ограниченными целями, низкими затратами и частыми запусками. Первой миссией в новой программе была Mars Global Surveyor, запущенный в 1996 году для картирования Марса и предоставления геологических данных с помощью инструментов, предназначенных для Mars Observer.[5] Вслед за Mars Global Surveyor, Марсианский климатический орбитальный аппарат имел два прибора, один из которых изначально предназначался для Mars Observer, для изучения климата и погоды Марса.
Основные научные цели миссии включали:[6]
- определить распределение вода на Марсе
- ежедневно следить за погодой и атмосферными условиями
- записывать изменения на поверхности Марса из-за ветра и других атмосферных воздействий
- определять температурные профили атмосферы
- контролировать содержание водяного пара и пыли в атмосфере
- ищите доказательства прошлых изменений климата.
Дизайн космического корабля
В Марсианский климатический орбитальный аппарат Автобус имел размеры 2,1 метра (6 футов 11 дюймов) в высоту, 1,6 метра (5 футов 3 дюйма) в ширину и 2 метра (6 футов 7 дюймов) в глубину. Внутренняя структура была в основном построена с использованием сотовых опор из графитового композита / алюминия, конструкция которой используется во многих коммерческих самолеты. За исключением научных приборов, батареи и главного двигателя, космический корабль имел двойное резервирование наиболее важных систем.[6][7]
Космический корабль был 3-осевая стабилизация и включены восемь гидразин монотопливо двигатели (четыре 22 Н (4,9 фунтаж) подруливающие устройства для коррекции траектории; четыре двигателя 0,9 Н (3,2 унции) для контрольное отношение). Ориентация космического корабля определялась звездный трекер, два Датчики солнца и два инерциальные единицы измерения. Ориентация контролировалась пусковыми двигателями или тремя колеса реакции. Для выполнения маневра вывода на орбиту Марса на космическом корабле был также установлен LEROS 1B ракета с главным двигателем,[8] обеспечивая 640 Н (140 фунтовж) тяги горением гидразин топливо с четырехокись азота (NTO) окислитель.[6][7]
Космический корабль включал 1,3-метровую (4 фута 3 дюйма) антенна с высоким коэффициентом усиления передавать данные с Сеть Deep Space над х-диапазон. Радиотранспондер, предназначенный для Кассини – Гюйгенс миссия использовалась в качестве меры экономии. Он также включал двусторонний УВЧ радиочастотная система для ретрансляции связи с Марс полярный посадочный модуль при предполагаемой посадке 3 декабря 1999 г.[6][7][9]
Космический зонд питался от 3-х панельная солнечная батарея, обеспечивая в среднем 500 Вт (0,67 л.с.) на Марсе. Развернутая солнечная батарея имела длину 5,5 метра (18 футов 1 дюйм). Питание было сохранено в 12-элементном, 16-амперном часе Никель-водородные батареи. Батареи предназначались для перезарядки, когда солнечная батарея получала солнечный свет и питала космический корабль, когда он уходил в тень Марса. При выходе на орбиту вокруг Марса солнечная батарея должна была использоваться в аэротормоз маневрировать, чтобы замедлить космический корабль до выхода на круговую орбиту. Дизайн был в значительной степени адаптирован из руководящих принципов Инициативы малых космических аппаратов, изложенных в книге, Технология для малых космических аппаратов.[6][7][10]
Стремясь упростить предыдущие реализации компьютеров на космических кораблях, Марсианский климатический орбитальный аппарат показал единственный компьютер, использующий IBM RAD6000 процессор, использующий POWER1 ISA способен работать на 5 МГц (60 м), 10 МГц (30 м) и 20 МГц (15 м). Хранение данных должно было поддерживаться на 128 МБ из оперативная память (RAM) и 18 МБ из флэш-память. Флэш-память предназначалась для хранения очень важных данных, включая троекратные копии программного обеспечения полетной системы.[6]
Научные инструменты



Инфракрасный радиометр с модуляцией давления (PMIRR) использует узкополосные радиометрические каналы и две ячейки модуляции давления для измерения атмосферных и поверхностных выбросов в тепловом инфракрасном диапазоне и видимый канал для измерения частиц пыли и конденсатов в атмосфере и на поверхности на различных долготах и сезоны.[11] Его главным исследователем был Дэниел МакКлиз из JPL / CALTECH. Позже аналогичные цели были достигнуты с помощью Климатический эхолот Марса на борту Марсианский разведывательный орбитальный аппарат. Его цели:[12]
- Составьте карту трехмерной и изменяющейся во времени тепловой структуры атмосферы от поверхности до высоты 80 км.
- Составьте карту атмосферной пыли и ее глобальных, вертикальных и временных изменений.
- Составьте карту сезонных и пространственных изменений вертикального распределения водяного пара в атмосфере на высоте не менее 35 км.
- Различайте атмосферные конденсаты и наносите на карту их пространственное и временное изменение.
- Составьте карту сезонной и пространственной изменчивости атмосферного давления.
- Следите за полярным радиационным балансом.
Марсианский цветной тепловизор (MARCI) - это двухкамерная (среднеугольная / широкоугольная) система визуализации, предназначенная для получения изображений поверхности и атмосферы Марса. При надлежащих условиях возможно разрешение до 1 километра (3300 футов).[13][14] Главным исследователем этого проекта был Майкл Малин. Малинские космические научные системы и проект был реинкорпорирован Марсианский разведывательный орбитальный аппарат. Его цели:[13]
- Наблюдайте за марсианскими атмосферными процессами в глобальном масштабе и синоптически.
- Изучите детали взаимодействия атмосферы с поверхностью в различных масштабах как в пространстве, так и во времени.
- Изучите особенности поверхности, характерные для эволюции марсианского климата с течением времени.
| Фильтр имя | Камера Угол | Длина волны | |
|---|---|---|---|
| (нм) | Цвет | ||
| UV1 | Широкий | 280 | Нет данных |
| UV2 | Широкий | 315 | Нет данных |
| MA1 | Середина | 445 | |
| WA1 | Широкий | 453 | |
| MA2 | Середина | 501 | |
| WA2 | Широкий | 561 | |
| MA3 | Середина | 562 | |
| WA3 | Широкий | 614 | |
| WA4 | Широкий | 636 | |
| MA4 | Середина | 639 | |
| WA5 | Широкий | 765 | |
| MA5 | Середина | 767 | |
| MA6 | Середина | 829 | Нет данных |
| MA7 | Середина | 903 | Нет данных |
| MA8 | Середина | 1002 | Нет данных |
- Изображения космического корабля

Схема Марсианский климатический орбитальный аппарат.

Марсианский климатический орбитальный аппарат во время сборки.
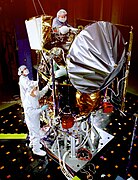
Марсианский климатический орбитальный аппарат проходят акустические испытания.

Марсианский климатический орбитальный аппарат ожидает испытания на вращение в ноябре 1998 года.




Профиль миссии
| Дата | Время (УНИВЕРСАЛЬНОЕ ГЛОБАЛЬНОЕ ВРЕМЯ) | Мероприятие |
|---|---|---|
| 11 декабря 1998 | 18:45:51 | Космический корабль запущен |
| 23 сен 1999 | 08:41:00 | Прошивка начинается. Орбитальный аппарат хранит солнечную батарею. |
| 08:50:00 | Орбитальный аппарат поворачивается в правильную ориентацию, чтобы начать работу главного двигателя. | |
| 08:56:00 | Орбитальный аппарат запускает пиротехнические устройства, которые открывают клапаны, чтобы создать давление в топливных баках и баках окислителя. | |
| 09:00:46 | Начинается горение главного двигателя; Ожидается, что сработает 16 минут 23 секунды. | |
| 09:04:52 | Связь с космическим кораблем потеряна | |
| 09:06:00 | Ожидается, что орбитальный аппарат выйдет на Марс затмение, вне радиосвязи с Землей.[n 1] | |
| 09:27:00 | Ожидается выход из затмения Марса.[n 1] | |
| 25 сен 1999 | Миссия объявила о проигрыше. Причина потери известна. Никаких дальнейших попыток связаться. |
Запуск и траектория
В Марсианский климатический орбитальный аппарат зонд был запущен 11 декабря 1998 г. в 18:45:51 UTC Национальное управление по аэронавтике и исследованию космического пространства из Космический стартовый комплекс 17А на Мыс Канаверал База ВВС во Флориде, на борту Дельта II 7425 ракета-носитель. Полная последовательность сжигания длилась 42 минуты, в результате чего космический корабль Переходная орбита Хомана, отправив зонд на 9,5 месяцев по траектории 669 миллионов км (416 миллионов миль).[6][9] При запуске Марсианский климатический орбитальный аппарат весил 638 кг (1407 фунтов), включая топливо.[1]
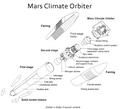
Схема ракеты-носителя Delta II в разобранном виде с Марсианский климатический орбитальный аппарат

Запуск космического аппарата Mars Climate Orbiter НАСА на Дельта II 7425 ракета-носитель
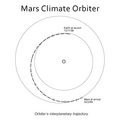
Межпланетная траектория Марсианский климатический орбитальный аппарат

Процедура аэротормоза для вывода Mars Climate Orbiter на орбиту вокруг Марса




Встреча с Марсом
Это изображение Марса 7 сентября 1999 года - единственное изображение, полученное орбитальным аппаратом.

Схема, сравнивающая предполагаемую и фактическую траектории орбитального корабля


Марсианский климатический орбитальный аппарат начал запланированный маневр вывода на орбиту 23 сентября 1999 г. в 09:00:46 UTC. Марсианский климатический орбитальный аппарат вышел из радиосвязи, когда космический корабль прошел позади Марса в 09:04:52 UTC, на 49 секунд раньше, чем ожидалось, и связь не была восстановлена. Из-за осложнений, связанных с человеческая ошибка, космический корабль столкнулся с Марсом на более низкой, чем предполагалось высоте, и был либо разрушен в атмосфере, либо повторно вошел в гелиоцентрическое пространство после выхода из атмосферы Марса.[2] Марсианский разведывательный орбитальный аппарат с тех пор выполнил большинство поставленных задач для этой миссии.
Причина отказа
—Эдвард Вейлер, помощник администратора НАСА по космической науке, IEEE Spectrum: почему марсианский зонд сбился с курса
10 ноября 1999 г. Марсианский климатический орбитальный аппарат Совет по расследованию ошибок выпустил отчет по фазе I, в котором подробно описаны предполагаемые проблемы, возникшие в связи с потерей космического корабля. Ранее, 8 сентября 1999 г., был вычислен маневр коррекции траектории-4 (TCM-4), который затем был выполнен 15 сентября 1999 г. Он был предназначен для размещения космического корабля в оптимальном положении для маневра вывода на орбиту, который должен был привести к тому, что космический корабль вокруг Марса на высоте 226 км (140 миль) 23 сентября 1999 года. Однако в течение недели между TCM-4 и маневром вывода на орбиту навигационная группа указала, что высота может быть намного ниже предполагаемой - от 150 до 170 км. (От 93 до 106 миль). За двадцать четыре часа до вывода на орбиту, по расчетам, орбитальный аппарат был установлен на высоте 110 км (68 миль); 80 км (50 миль) - это минимальная высота, на которой Марсианский климатический орбитальный аппарат считалось способным выжить во время этого маневра. Расчеты после сбоя показали, что космический корабль двигался по траектории, которая должна была привести к орбитальному аппарату в пределах 57 км (35 миль) от поверхности, где космический корабль, вероятно, сильно прыгнул в самые верхние слои атмосферы и был либо разрушен в атмосфере, либо снова вошел гелиоцентрическое пространство.[2]
Основная причина этого несоответствия заключалась в том, что одна часть наземного программного обеспечения, поставляемого Локхид Мартин дала результаты в Обычная единица США, вопреки своей спецификации программного интерфейса (SIS), в то время как вторая система, предоставленная НАСА, ожидала, что эти результаты будут в единицах СИ, в соответствии с SIS. В частности, программное обеспечение, рассчитывающее общую импульс произведенные пусками двигателя дали результаты в фунт-сила секунд. Затем программа расчета траектории использовала эти результаты - ожидается, что они будут Ньютон секунды (неверно в 4,45 раза)[15] - обновить прогнозируемое положение космического корабля.[16]
Тем не менее, НАСА не возлагает ответственность за потерю миссии на Lockheed; вместо этого различные официальные лица в НАСА заявили, что само НАСА было виновато в том, что не провело соответствующих проверок и тестов, которые позволили бы выявить несоответствие.[17]
Расхождение между расчетным и измеренным положением, приводящее к расхождению между желаемой и фактической высотой вывода на орбиту, было замечено ранее по крайней мере двумя штурманами, чьи опасения были отклонены, поскольку они «не соблюдали правила заполнения [формы] для задокументируйте их озабоченность ". Было созвано совещание инженеров по программному обеспечению траектории, операторов программного обеспечения траектории (навигаторов), инженеров по силовым установкам и менеджеров, чтобы рассмотреть возможность выполнения маневра коррекции траектории-5, который был в графике. Участники встречи вспоминают о соглашении о проведении ТКМ-5, но в конечном итоге это не было сделано.[17]
Стоимость проекта
По данным НАСА, общая стоимость миссии составила 327,6 миллиона долларов для орбитального аппарата и посадочного модуля, включая 193,1 миллиона долларов на разработку космического корабля, 91,7 миллиона долларов на его запуск и 42,8 миллиона долларов на операции миссии.[18]
Смотрите также
- Список миссий на Марс
- Список искусственных объектов на Марсе
- Список ошибок программного обеспечения
- Метрика
Примечания
Рекомендации
- ^ а б c "КЛИМАТИЧЕСКИЙ ОРБИТЕР МАРСА 1998 ГОДА ПРИБЫЛ В КОСМИЧЕСКИЙ ЦЕНТР НАСА КЕННЕДИ ДЛЯ ОКОНЧАТЕЛЬНОЙ ПОДГОТОВКИ К ЗАПУСКУ" (Пресс-релиз). ОТДЕЛ НАСА ПО СВЯЗИ С МЕДИАМИ. 14 сентября 1998 г. Архивировано с оригинал 8 октября 1999 г.. Получено 3 января, 2011.
- ^ а б c Стивенсон, Артур Дж .; LaPiana, Lia S .; Mulville, Daniel R .; Ратледж, Питер Дж .; Бауэр, Франк Х .; Фольта, Дэвид; Dukeman, Greg A .; Сакхейм, Роберт; Норвиг, Питер (10 ноября 1999 г.). Отчет Совета по расследованию ошибок марсианского климатического орбитального аппарата, этап I (PDF). НАСА.
- ^ «Метрическая неудача привела к потере орбитального аппарата НАСА». CNN. 30 сентября 1999 г.. Получено Двадцать первое марта, 2016.
- ^ Группа по технологии малых космических аппаратов, Национальный исследовательский совет (1994). Технология для малых космических аппаратов. Вашингтон, округ Колумбия.: Национальная академия прессы. ISBN 0-309-05075-8. Получено 13 января, 2011.
- ^ Комитет по исследованию планет и Луны, Комиссия по физическим наукам, математике и приложениям, Национальный исследовательский совет (1995). Роль малых миссий в исследовании планет и Луны. Вашингтон, округ Колумбия.: Национальная академия прессы. Получено 13 января, 2011.
- ^ а б c d е ж грамм "Пресс-кит о прибытии климатического орбитального аппарата на Марс" (PDF) (Пресс-релиз). НАСА / Лаборатория реактивного движения. Сентябрь 1999. Получено 13 января, 2011.
- ^ а б c d "Описание полетной системы орбитального космического аппарата" Марс ". НАСА / Лаборатория реактивного движения. 1998 г.. Получено 13 января, 2011.
- ^ LEROS 1B В архиве 3 сентября 2011 г. Wayback Machine
- ^ а б "Пресс-кит о полетах на Марс 1998 г." (PDF) (Пресс-релиз). НАСА / Лаборатория реактивного движения. Декабрь 1998. Получено 13 января, 2011.
- ^ Группа по технологии малых космических аппаратов, Национальный исследовательский совет (1994). Технология для малых космических аппаратов. Вашингтон, округ Колумбия: National Academy Press. С. 121–123. ISBN 0-309-05075-8. Получено 13 января, 2011.
- ^ «Инфракрасный радиометр с модулированным давлением (PMIRR)». НАСА / Национальный центр данных по космическим наукам. Получено 19 февраля, 2011.
- ^ Олби, Арден Л. (1988). "Семинар по науке о возврате проб с Марса". Лунно-планетный институт: 25–29. Bibcode:1988 мср. Работа ... 25А. Цитировать журнал требует
| журнал =(помощь) - ^ а б c Малин, M.C .; Bell (III), J.F .; Calvin, W.M .; Caplinger, M.A .; Clancy, R.T .; Harberle, R.M .; Джеймс, П. Б.; Lee, S.W .; Ravine, M.A .; Thomas, P .; Вольф, М.Дж. (2001). «Марсианский цветной тепловизор (MARCI) на космическом орбитальном аппарате Марса» (PDF). Журнал геофизических исследований. 106 (E8): 17, 651–17, 672. Bibcode:2001JGR ... 10617651M. Дои:10.1029 / 1999JE001145. Получено 13 января, 2011.
- ^ "Марсианский цветной тепловизор (MARCI)". НАСА / Национальный центр данных по космическим наукам. Получено 19 февраля, 2011.
- ^ Отчет Совета по расследованию ошибок марсианского климатического орбитального аппарата, этап I, стр. 13
- ^ «Отчет Совета по расследованию ошибок орбитального орбитального аппарата Марса по фазе I» (PDF) (Пресс-релиз). НАСА. 10 ноября 1999 г.. Получено 22 февраля, 2013.
- ^ а б Оберг, Джеймс (1 декабря 1999 г.). "Почему марсианский зонд сбился с курса". IEEE Spectrum. IEEE. Получено 13 июля, 2016.
- ^ "Информационный бюллетень Mars Climate Orbiter". mars.nasa.gov. НАСА-Лаборатория реактивного движения. В архиве из оригинала 3 октября 2012 г.. Получено 3 августа, 2020.
внешняя ссылка
| Викискладе есть медиафайлы по теме Марсианский климатический орбитальный аппарат. |
- Пресс-кит о запуске Mars Surveyor '98
- Прибытие орбитального аппарата Mars Climate Orbiter на Марс для прессы
- Профиль миссии Mars Climate Orbiter к Исследование солнечной системы НАСА
- Координированный архив данных космической науки НАСА

.jpg)
.jpg)