WikiDer > Адаптивный фильтр
Эта статья включает в себя список общих использованная литература, но он остается в основном непроверенным, потому что ему не хватает соответствующих встроенные цитаты. (Февраль 2013) (Узнайте, как и когда удалить этот шаблон сообщения) |
An адаптивный фильтр система с линейной фильтр что есть функция передачи контролируется переменными параметрами и средствами регулировки этих параметров в соответствии с алгоритм оптимизации. Из-за сложности алгоритмов оптимизации почти все адаптивные фильтры цифровые фильтры. Адаптивные фильтры требуются для некоторых приложений, потому что некоторые параметры желаемой операции обработки (например, расположение отражающих поверхностей в реверберационный пробел) заранее не известны или меняются. Адаптивный фильтр с обратной связью использует обратную связь в виде сигнала ошибки для уточнения передаточной функции.
Вообще говоря, адаптивный процесс с обратной связью включает использование функция стоимости, который является критерием оптимальной производительности фильтра, для подачи в алгоритм, который определяет, как изменить передаточную функцию фильтра, чтобы минимизировать затраты на следующей итерации. Наиболее распространенная функция стоимости - это средний квадрат сигнала ошибки.
Как сила цифровые сигнальные процессоры увеличилось, адаптивные фильтры стали гораздо более распространенными и теперь обычно используются в таких устройствах, как мобильные телефоны и другие устройства связи, видеокамеры и цифровые камеры, а также оборудование для медицинского наблюдения.
Пример приложения
Запись сердечного ритма ( ЭКГ), может быть поврежден шумом от Сеть переменного тока. Точная частота мощности и ее гармоники может меняться от момента к моменту.
Один из способов удалить шум - отфильтровать сигнал с помощью режекторный фильтр на частоте сети и в ее окрестностях, но это может чрезмерно ухудшить качество ЭКГ, поскольку сердцебиение также, вероятно, будет иметь частотные компоненты в отклоненном диапазоне.
Чтобы избежать этой потенциальной потери информации, можно использовать адаптивный фильтр. Адаптивный фильтр будет принимать входные данные как от пациента, так и от сети и, таким образом, сможет отслеживать фактическую частоту шума по мере его колебаний и вычитать шум из записи. Такой адаптивный метод обычно позволяет использовать фильтр с меньшим диапазоном отклонения, что означает, в этом случае, что качество выходного сигнала более точное для медицинских целей.[1][2]
Блок-схема
Идея адаптивного фильтра с обратной связью заключается в том, что переменный фильтр регулируется до минимума ошибки (разницы между выходным сигналом фильтра и желаемым сигналом). В Фильтр наименьших средних квадратов (LMS) и Рекурсивный фильтр наименьших квадратов (RLS) - это типы адаптивного фильтра.
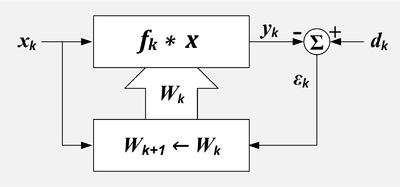 Адаптивный фильтр. k = номер выборки, x = эталонный ввод, X = набор последних значений x, d = желаемый ввод, W = набор коэффициентов фильтра, ε = вывод ошибок, f = импульсная характеристика фильтра, * = свертка, Σ = суммирование, верхний прямоугольник = линейный фильтр, нижний прямоугольник = алгоритм адаптации
Адаптивный фильтр. k = номер выборки, x = эталонный ввод, X = набор последних значений x, d = желаемый ввод, W = набор коэффициентов фильтра, ε = вывод ошибок, f = импульсная характеристика фильтра, * = свертка, Σ = суммирование, верхний прямоугольник = линейный фильтр, нижний прямоугольник = алгоритм адаптации


На адаптивный фильтр поступают два входных сигнала: и которые иногда называют первичный ввод и эталонный вход соответственно.[3] Алгоритм адаптации пытается отфильтровать эталонный вход в копию желаемого входа, минимизируя остаточный сигнал, . Когда адаптация прошла успешно, выходной сигнал фильтра фактически является оценкой полезного сигнала.




- который включает полезный сигнал плюс нежелательные помехи и
- который включает сигналы, которые коррелируют с некоторыми нежелательными помехами в .
- k представляет собой дискретный номер образца.
Фильтр управляется набором L + 1 коэффициентов или весов.
- представляет набор или вектор весов, которые управляют фильтром во время выборки k.
- где относится к вес в k-й раз.
- представляет изменение весов, которое происходит в результате корректировок, вычисленных во время выборки k.
- Эти изменения будут применены после времени выборки k и до того, как они будут использованы во время выборки k + 1.
![{ mathbf {W}} _ {{k}} = left [w _ {{0k}}, , w _ {{1k}}, , ..., , w _ {{Lk}} right] ^ {{T}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/927bf9a780012f1a80bb6608a3ff410221a7b43e)



Выход обычно но это могло быть или это могут быть даже коэффициенты фильтра.[4](Видроу)
Входные сигналы определяются следующим образом:

- куда:
- г = желаемый сигнал,
- г' = сигнал, который коррелирует с желаемым сигналом г ,
- ты = нежелательный сигнал, который добавляется к г , но не коррелирует с г или г'
- ты' = сигнал, который коррелирует с нежелательным сигналом ты, но не коррелирует с г или г',
- v = нежелательный сигнал (обычно случайный шум), не коррелированный с г, г', ты, ты' или v',
- v' = нежелательный сигнал (обычно случайный шум), не коррелированный с г, г', ты, ты' или v.

Выходные сигналы определяются следующим образом:
- .
- куда:
- = выход фильтра, если вход был только г',
- = выход фильтра, если вход был только ты',
- = выход фильтра, если вход был только v'.





КИХ-фильтр с отводной линией задержки
Если переменный фильтр имеет линию задержки с отводом Конечная импульсная характеристика (FIR) структуры, то импульсная характеристика равна коэффициентам фильтра. Выходной сигнал фильтра определяется выражением
- где относится к вес в k-й раз.

Идеальный случай
В идеальном случае . Все нежелательные сигналы в представлены . полностью состоит из сигнала, коррелированного с нежелательным сигналом в .



Выход переменного фильтра в идеальном случае
- .

Сигнал ошибки или функция стоимости разница между и
- . Желаемый сигнал гk проходит без изменений.

Сигнал ошибки минимизируется в среднеквадратическом смысле, когда сводится к минимуму. Другими словами, является наилучшей среднеквадратической оценкой . В идеальном случае и , и все, что остается после вычитания, который является неизменным полезным сигналом с удалением всех нежелательных сигналов.
![[u_ {k} - { hat {u}} _ {k}]](https://wikimedia.org/api/rest_v1/media/math/render/svg/cbc75695df122bd9dc20a1832864efec904c1446)




Компоненты сигнала в опорном входе
В некоторых ситуациях эталонный вход включает компоненты полезного сигнала. Это означает, что g '≠ 0.
Полное подавление нежелательных помех в этом случае невозможно, но возможно улучшение отношения сигнал / помеха. Выход будет
- . Желаемый сигнал будет изменен (обычно уменьшен).

Отношение выходного сигнала к помехе имеет простую формулу, называемую инверсия мощности.
- .
- где
- = отношение выходного сигнала к помехе.
- = Опорный сигнал к помехе.
- = частота в z-области.
- где




Эта формула означает, что выходной сигнал к помехе на определенной частоте является обратной величиной опорного сигнала к помехе.[5]
Пример. В ресторане быстрого питания есть подъездное окно. Прежде чем подойти к окну, покупатель оформляет заказ, говоря в микрофон. Микрофон также улавливает шум двигателя и окружающей среды. Этот микрофон обеспечивает основной сигнал. Мощность сигнала от голоса клиента и мощность шума от двигателя равны. Работникам ресторана сложно понять клиента. Чтобы уменьшить количество помех в основном микрофоне, второй микрофон расположен там, где он предназначен для улавливания звуков двигателя. Он также улавливает голос клиента. Этот микрофон является источником опорного сигнала. В этом случае шум двигателя в 50 раз сильнее голоса клиента. После схождения компенсатора отношение первичного сигнала к помехе будет улучшено с 1: 1 до 50: 1.
Адаптивный линейный комбайнер
 Адаптивный линейный комбайнер, показывающий комбайнер и процесс адаптации. k = номер выборки, n = индекс входной переменной, x = эталонные входы, d = желаемый вход, W = набор коэффициентов фильтра, ε = выход ошибки, Σ = суммирование, верхний прямоугольник = линейный сумматор, нижний прямоугольник = алгоритм адаптации.
Адаптивный линейный комбайнер, показывающий комбайнер и процесс адаптации. k = номер выборки, n = индекс входной переменной, x = эталонные входы, d = желаемый вход, W = набор коэффициентов фильтра, ε = выход ошибки, Σ = суммирование, верхний прямоугольник = линейный сумматор, нижний прямоугольник = алгоритм адаптации.


Адаптивный линейный сумматор (ALC) напоминает FIR-фильтр с адаптивной линией задержки с ответвлениями, за исключением того, что между значениями X нет предполагаемой взаимосвязи. Если бы значения X были из выходов линии задержки с ответвлениями, тогда комбинация линии задержки с ответвлениями и ALC составляла бы адаптивный фильтр. Однако значения X могут быть значениями массива пикселей. Или они могут быть выходами нескольких линий задержки с ответвлениями. ALC находит применение в качестве адаптивного формирователя луча для решеток гидрофонов или антенн.
- где относится к вес в k-й раз.

Алгоритм LMS
Если переменный фильтр имеет структуру FIR с ответвленной линией задержки, то алгоритм обновления LMS особенно прост. Обычно после каждой выборки коэффициенты КИХ-фильтра регулируются следующим образом:[6](Видроу)
- за

- μ называется коэффициент сходимости.

Алгоритм LMS не требует, чтобы значения X имели какое-либо конкретное отношение; поэтому его можно использовать для адаптации линейного сумматора, а также FIR-фильтра. В этом случае формула обновления записывается как:

Эффект алгоритма LMS заключается в том, что каждый раз k вносит небольшое изменение в каждый вес. Направление изменения таково, что оно уменьшило бы ошибку, если бы оно было применено в момент времени k. Величина изменения каждого веса зависит от μ, соответствующего значения X и ошибки в момент времени k. Веса, вносящие наибольший вклад в выпуск, , меняются больше всего. Если ошибка равна нулю, значит, веса не должны изменяться. Если соответствующее значение X равно нулю, то изменение веса не имеет значения, поэтому оно не изменяется.
Конвергенция
μ контролирует, насколько быстро и насколько алгоритм сходится к оптимальным коэффициентам фильтра. Если μ слишком велико, алгоритм не сойдется. Если μ слишком мало, алгоритм сходится медленно и может быть не в состоянии отслеживать изменяющиеся условия. Если μ велико, но не слишком велико для предотвращения сходимости, алгоритм быстро достигает установившегося состояния, но постоянно выходит за пределы оптимального вектора веса. Иногда μ сначала делают большим для быстрой сходимости, а затем уменьшают, чтобы минимизировать выброс.
В 1985 году Уидроу и Стернс заявили, что им ничего не известно о доказательстве того, что алгоритм LMS будет сходиться во всех случаях.[7]
Однако при определенных предположениях о стационарности и независимости можно показать, что алгоритм сходится, если

- где
- = сумма всей входной мощности
- где

- это RMS ценность ый вход

В случае фильтра линии задержки с отводом каждый вход имеет одно и то же среднеквадратичное значение, потому что это просто одни и те же значения задержки. В этом случае общая мощность

- где
- это среднеквадратичное значение , входной поток.[7]
- где

Это приводит к нормализованному алгоритму LMS:
- в этом случае критерием сходимости становится: .


Нелинейные адаптивные фильтры
Цель нелинейных фильтров - преодолеть ограничения линейных моделей. Есть несколько часто используемых подходов: Volterra LMS, Адаптивный фильтр ядра, Адаптивный фильтр сплайна [8] и адаптивный фильтр Урысона.[9][10] Многие авторы [11] включить в этот список также нейронные сети. Общая идея Volterra LMS и Kernel LMS заключается в замене выборок данных различными нелинейными алгебраическими выражениями. Для Volterra LMS это выражение Вольтерра серия. В адаптивном фильтре Spline модель представляет собой каскад линейного динамического блока и статической нелинейности, который аппроксимируется сплайнами. В адаптивном фильтре Урысона линейные члены в модели

заменяются кусочно-линейными функциями

которые идентифицируются из выборок данных.
Применение адаптивных фильтров
Реализации фильтров
- Фильтр наименьших средних квадратов
- Рекурсивный фильтр наименьших квадратов
- Адаптивный фильтр в частотной области с блоком с несколькими задержками
Смотрите также
- 2D адаптивные фильтры
- Фильтр (обработка сигнала)
- Фильтр Калмана
- Адаптивный фильтр ядра
- Линейное предсказание
- Оценщик MMSE
- Винеровский фильтр
- Уравнение Винера-Хопфа
использованная литература
- ^ Thakor, N.V .; Чжу И-Шэн (1 августа 1991 г.). «Приложения адаптивной фильтрации к анализу ЭКГ: шумоподавление и обнаружение аритмии». IEEE Transactions по биомедицинской инженерии. 38 (8): 785–794. Дои:10.1109/10.83591. ISSN 0018-9294. PMID 1937512.
- ^ Видроу, Бернард; Стернс, Сэмюэл Д. (1985). Адаптивная обработка сигналов (1-е изд.). Прентис-Холл. п.329. ISBN 978-0130040299.
- ^ Widrow p 304
- ^ Widrow p 212
- ^ Widrow p 313
- ^ Widrow p 100
- ^ а б Widrow стр 103
- ^ Данило Комминиелло; Хосе К. Принсипи (2018). Адаптивные методы обучения для моделирования нелинейных систем. Elsevier Inc. ISBN 978-0-12-812976-0.
- ^ М.Полуэктов и А.Поляр. Адаптивный фильтр Урысона. 2019.
- ^ «Нелинейная адаптивная фильтрация». ezcodesample.com.
- ^ Вэйфэн Лю; Хосе К. Принсипи; Саймон Хайкин (март 2010 г.). Адаптивная фильтрация ядра: всестороннее введение (PDF). Вайли. С. 12–20. ISBN 978-0-470-44753-6.
Источники
- Хейс, Монсон Х. (1996). Статистическая цифровая обработка сигналов и моделирование. Вайли. ISBN 978-0-471-59431-4.
- Хайкин, Саймон (2002). Теория адаптивного фильтра. Прентис Холл. ISBN 978-0-13-048434-5.
- Видроу, Бернард; Стернс, Сэмюэл Д. (1985). Адаптивная обработка сигналов. Энглвуд Клиффс, Нью-Джерси: Prentice Hall. ISBN 978-0-13-004029-9.